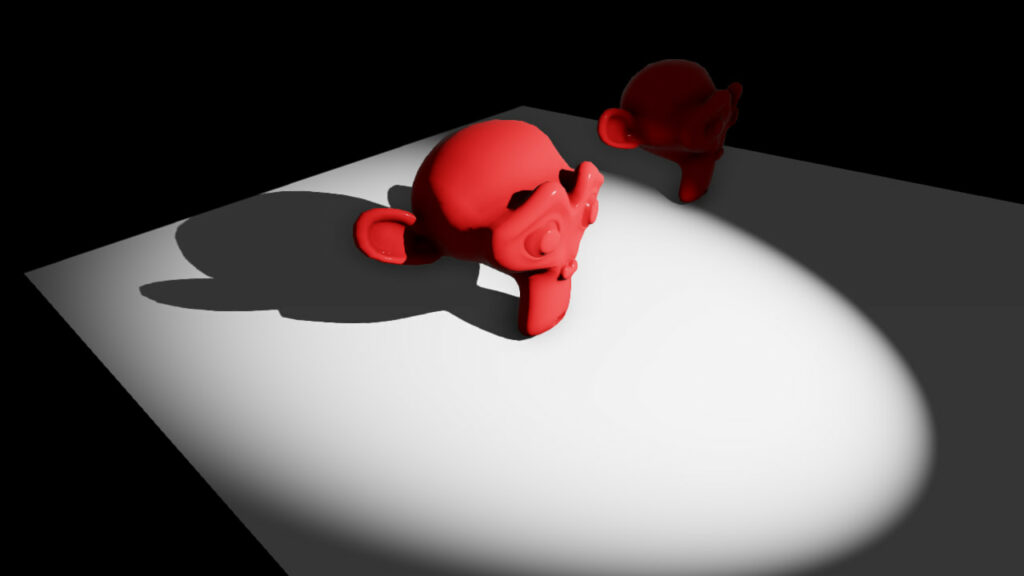
Выпустил новую версию движка. В Dagon 0.27 наконец-то появились тени от позиционных источников света (то есть, для всех, кроме Sun) — это реализовано техникой двойного параболоида, которая значительно эффективнее классического подхода с теневой кубической картой. Чтобы включить тень, ничего особенного делать не надо, просто light.shadowEnabled = true;.
Также добавил префильтрацию кубических карт — свертку с использованием GGX BRDF под различные значения шероховатости. Чтобы сконвертировать равнопромежуточную карту в кубическую, а затем отфильтровать, нужно сделать так:
uint resolution = 1024;
Texture cubemap = generateCubemap(resolution, aEnvmap.texture, null);
Texture prefilteredCubemap = prefilterCubemap(resolution, cubemap, assetManager);
Delete(cubemap);
Появилась поддержка анизотропной фильтрации текстур (если поддерживается расширение GL_EXT_texture_filter_anisotropic). Включается следующим образом:
texture.useAnisotropicFiltering = true;
texture.anisotropy = texture.maxAnisotropy;
Добавлена поддержка поля extras для большинства объектов в загрузчике glTF (кроме материалов и текстур).
Еще одна новая фича — поддержка локализации приложений (dagon.core.i18n). Локали — файлы *.lang — загружаются из папки locales. Например, чтобы добавить русскую локаль, нужно добавить файл locales/ru_RU.lang.
Синтаксис файлов точно такой же, как у конфигов. Например, можно сделать так:
hello_world: "Привет, мир!";
В приложении:
string text = application.translate("hello_world");
Приложение сначала пытается загрузить locales/en_US.lang, затем локализацию, выбранную в зависимости от текущего системного языка и региона, перезаписывая дефолтные английские значения. Либо пользователь может явно указать нужную ему локаль в settings.conf:
locale: "ru_RU";