Вышел Dagon 1.1.1. Добавлено свойство GLTFMeshPrimitive.materialIndex, индекс материала в файле glTF. Этот индекс записывается в структуру Triangle при обходе по граней с помощью GLTFAsset.opApply, что позволяет передавать данные о материалах в различные обработчики мешей. Основное применение этой фичи — учет материалов при обнаружении столкновений и рейкастинге. Соответственно, в dagon:newton добавлена поддержка индексов материалов при создании NewtonMeshShape. В интерфейсный метод NewtonRaycaster.onRayHit добавлен параметр long id, через который коллбек получает искомый индекс материала при попадании луча в меш.
Пошла серьезная работа над Chillwave Drive. Я уже рассказывал про ИИ, но, помимо этого, на днях улучшил модель колеса и наконец-то добавил поддержку материалов, чтобы машина учитывала свойства покрытия. Например, когда машина вылетает с трассы, то трава на обочине сильно ее замедляет и не дает разгоняться. Также добавил HUD-тахометр, обновил текстуры тестовой трассы, реализовал эффекты погоды — дождь и динамически появляющееся и исчезающее за облаками солнце. У игры появилась страничка на GameJolt, где я регулярно выкладываю альфа-версии.
Привел в порядок блог, объединил старую версию и новую, подкорректировал неактуальную информацию.
Jolt Physics включает не только готовый контроллер персонажа, но и полнофункциональный raycast vehicle — причем, это не экспериментальная поделка-бонус, как часто бывает в физдвижках, а серьезный такой префаб, который с минимальными усовершенствованиями можно брать для создания симкейда коммерческого уровня. Достаточно сказать, что он безо всякой доработки напильником уже выглядит лучше, чем, скажем, печально известная физика авто в Cyberpunk 2077. А если еще подобрать реалистичные параметры подвески и инерцию шасси, заменить встроенную модель трения шин на свою, то вообще идеально!
На видео — демка 4×4, которую я накидал буквально за день, изучив VehicleController в Jolt:
Пока в Dagon нет соответствующей объектной обертки, но это не проблема, так как можно использовать любые функции joltc напрямую. Исходники и сборку планирую выпустить одновременно с Dagon 0.42, где будет несколько важных улучшений в dagon:jolt и dagon:audio.
В новой версии движка дебютирует физический движок Jolt Physics, в виде расширения dagon:jolt. Он предоставляет примерно тот же набор возможностей, что и Newton, при этом он лучше оптимизирован под многоядерные процессоры, а также имеет встроенный контроллер персонажа, который работает более стабильно, чем старый NewtonCharacterController. Newton, однако, в обозримом будущем никуда не денется, оба расширения будут развиваться параллельно. Я планирую также добавить поддержку встроенного симулятора автомобиля Jolt — об экспериментах с ним напишу как-нибудь в отдельном посте.
Исправлен микростаттеринг, связанный с неверной работой главного таймера. Визуально это проявлялось в виде периодических скачков изображения, заметных при движении камеры. Свойство stepFrequency переименовано в updatesPerSecond, в классе Application и в settings.conf.
Добавлены новые цветовые профили вывода: линейный (gl.outputColorProfile = "Linear") и Gamma 2.4 (gl.outputColorProfile = "Gamma24").
Добавлено новое свойство Entity.autoUpdateTransformation. Если его отключить, то Dagon не будет автоматически обновлять матрицы трансформации Entity. Это нужно, главным образом, в компонентах, которые заменяют встроенную трансформацию своей собственной математикой.
Реализована поддержка кинематических тел в dagon:newton. С их помощью можно реализовать, например, движущиеся платформы. Также добавлены новые свойства NewtonRigidBody: bodyType, collisionShape, angularVelocity, acceleration, linearDamping, angularDamping, simulationState, collidable, sleepState, autoSleep, freezeState, gyroscopicTorque и новые методы setMassMatrix, setMassProperties. В контроллере персонажа исправлено застревание в стенах при прыжке.
В dagon:audio добавлены новый метод AudioManager.setPlaySpeed и опциональный параметр громкости в методах SoundComponent.play.
Изучение того, как устроены гоночные игры, стало для меня настоящим квестом — с 2017 года я посвятил этому немало времени. В этой статье я поделюсь своим опытом и раскрою ряд неочевидных хитростей, которые упрощают и оптимизируют физическую модель автомобиля.
Стоит сначала оговориться, что я имею в виду под автосимом. Традиционно все гонки делятся на два поджанра — аркадные гонки и автосимуляторы. В аркадных не используется реалистичная динамика, вместо нее — различные формы кинематики и визуальные эффекты, имитирующие физику автомобиля: например, видимость управляемого заноса — машина «смотрит» в одну сторону, но едет в другую, и игрок может управлять этим поведением при помощи какого-то простого механизма ввода (например, мобильный NFS: No Limits позволяет войти в дрифт свайпом по экрану в нужную сторону). Симулятор же в обязательном порядке использует настоящий физический движок — динамику твердых тел. В нем все честно: силы, моменты, ускорение, моделирование подвесок и трения в шинах. Как следствие, управлять симулируемым транспортом заметно сложнее, но мы получаем невероятное преимущество — практически все феномены, наблюдаемые на дороге в реальности, возникают как следствие модели, и их не нужно специально имитировать. Классический пример симулятора — Assetto Corsa.
Где-то в промежутке между чистой аркадой и строгой симуляцией затесались так называемые симкейды (simcade). Этим термином называют упрощенные симуляторы, где параметров меньше, и вождение не требует понимания автомобильной механики — при этом они настолько физичны, насколько это важно для сохранения реализма. Типичные примеры — франшизы Gran Turismo и Forza Motorsport, но, по моему мнению, любые «физичные» гонки, для которых необязателен руль и достаточно контроллера с аналоговыми стиками, можно считать симкейдом. В эпоху первой PlayStation мне дико нравилась TOCA World Touring Cars — хрестоматийный симкейд, причем, по тем временам, на удивление реалистичный: у машин правдоподобно деформировались любые части кузова, отваливался бампер, можно было даже потерять колесо. Создавая свой автомобильный движок, я держал в голове стиль именно таких игр. Следуя этой статье, конкурент Assetto Corsa вы, конечно, вряд ли сделаете, но, тем не менее, физика получится очень близкая к реальности — не хуже (а может быть, где-то даже лучше), чем во многих коммерческих играх.
Как я уже не раз отмечал, игровая физика — это крайне недооцененный вид софта. Люди много говорят о графике, обыватель в играх вообще ничего, кроме графона, не замечает. А между тем, проверка столкновений и физика — вот что по-настоящему важно. Устаревший визуал и любительский уровень моделей игре можно простить, но проваливание персонажа сквозь пол и стены — нет. Я видел множество инди-проектов, потенциал которых был загублен именно плохой физикой (и, как следствие, неудобным управлением), а не графической или геймплейной составляющими. В мире инди и СПО вообще редко связываются с «физичными» жанрами типа экшнов, гонок, симуляторов и т.д. Свободные игры — это в основном стратегии, песочницы, 2D-аркады, рогалики. Физика довольно устойчиво ассоциируется с AAA и колоссальными бюджетами крупных издателей. Причина, конечно, в том, что она непредсказуема и плохо программируется. Она хороша в «чистом» виде — скажем, в симуляторе бильярда, где простая геометрия и нет вычислительно сложных ситуаций. Но если физика должна быть подчинена игровой логике, а не наоборот, то решения «по учебнику» резко перестают работать, приходится изобретать невиданные хаки и решать дичайшие корнер-кейсы. Это и отличает AAA от любительского геймдева — там коммерческие секреты, ноу-хау, огромный опыт. Я вот давно уже пишу контроллеры персонажа и не понаслышке знаю, как это непросто. А ведь хочется получить этот священный Грааль — чтобы персонаж свободно двигался по карте, не застревал, правильно сталкивался с препятствиями, поднимался по склонам и лестницам. Сегодня это необходимая база для 3D-игр любого жанра, кроме совсем уж простеньких.
Я пробовал писать собственный физдвижок (dmech). Это был очень полезный опыт, но, взвесив все «за» и «против», я все-таки решил использовать то, что сделано профессионалами — я ведь не физик, а графический разработчик. Пусть каждый занимается тем, что лучше всего получается. Я выбрал Newton Game Dynamics, который долгое время был, пожалуй, самым оптимизированным и точным среди всех, что имеют C-интерфейс. Это отличный физический движок, и я очень благодарен Хулио Хересу за этот проект, Newton много лет был прекрасным дополнением к Dagon. Я долго не хотел его менять, но технологии не стоят на месте. Newton 3 заметно устаревает, а Newton 4 — это уже чистый C++ без C-враппера, поэтому настало время переходить на что-то альтернативное. Есть серьезные основания полагать, что новым стандартом индустрии станет Jolt Physics от Guerrilla Games. Jolt используется в их движке Decima, лежащем в основе серий Horizon и Death Stranding — редкий случай, когда технология AAA-уровня сразу переходит в Open Source! Jolt — это реальный конкурент PhysX и Bullet, многие бесплатные и свободные игровые движки уже переходят на него один за другим: Godot, NeoAxis, Dagor. И, что самое замечательное, к Jolt есть полноценный C-враппер, позволяющий использовать его не только в C++.
Итак, что же там такого уникального? Во-первых, отличная оптимизация под SIMD и поддержка многопоточности (правда, это имеет значение лишь при каких-то редко встречающихся высоких CPU-нагрузках). Во-вторых, изначальная ориентация на игры — дизайн и набор фич показывают, что Jolt разработан игроделами для игроделов, для реального продакшна, а не академических публикаций. Движок ощущается, как некий «бесплатный Havok» из закромов энтерпрайза. У него много архитектурных особенностей, но в целом с ним очень приятно работать. Например, очень понравилось, что структуры векторов и кватернионов в Jolt бинарно совместимы с моими родными Vector3f и Quaternionf. Да и сама синхронизация через позиции и кватернионы вместо матриц 4×4 — это мудро, так как матрицы требуют декомпозиции.
Я, пока писал этот пост, уже успел написать для Dagon базовую обертку над Jolt (расширение dagon:jolt), концептуально весьма близкую с dagon:newton. Движки во многом похожи — используется классическая схема с разделением на тела и полиморфные шейпы. Многие функции имеют более удобный API, чем в Newton — например, рейкастинг. В данный момент обертка поддерживает создание статических и динамических тел, шейпов всех видов, включая меши, а также базовый контроллер персонажа, который я планирую довести, как минимум, до уровня NewtonCharacterController. К релизу Dagon 0.41 будут добавлены сочленения.
Контроллер персонажа CharacterVirtual особенно порадовал: я решил сразу попробовать его в деле. Шикарно, что управление контроллером (включая гравитацию и прыжок) осуществляется путем произвольного изменения вектора скорости — можно реализовать любую механику. Контроллер стабильный и точный, встроенный ground-тест работает надежно — основа для игры от первого лица пишется буквально за один вечер.
В Jolt есть поддержка мягких тел и даже встроенный симулятор автомобиля! Очень надеюсь, что когда-нибудь все это тоже получится перенести в dagon:jolt.
Использовать расширение не сложнее, чем dagon:newton, а в чем-то даже проще. Сначала нужно вызвать joltInit для инициализации:
Вышла новая версия движка, в которой добавлена поддержка таймеров (Application.setTimer и событие Timer) и новый модуль dagon.core.sysinfo, предоставляющий базовую информацию об аппаратно-программной платформе, на которой запущено приложение. Исправлен забагованный метод Properties.serialize, реализована поддержка текстур в формате WebP в загрузчике glTF (расширение EXT_texture_webp для текстур), добавлена поддержка Entity.blurMask в режиме прямого рендеринга. Объект NewtonMeshShape в расширении dagon:newton теперь можно создавать с передачей матрицы трансформации, которая применяется ко всем вершинам меша. Также добавлен Dagon Platform — комплект для разработки игр под Dagon на языке GScript3, о нем я расскажу подробнее в одном из следующих постов.
Chillwave Drive 0.2.0
Демка автомобильной физики значительно обновлена: улучшена графика, модель машины заменена на McLaren GT, исправлено множество мелких недочетов в симуляторе, благодаря чему демка теперь адекватно поддерживает заднеприводные авто, а также устранен баг в модели колес, который создавал лишнюю боковую силу в некоторых ситуациях. Я решил развивать Chillwave Drive в качестве полноценной игры, в связи с чем создал соответствующую страничку на сайте GameJolt. Вероятнее всего, это будет симкейд для расслабляющего вождения, в котором можно добавлять собственные машины, настраивать окружение и т.д.
Значительно обновлена демка физики автомобиля на Dagon, которая отныне называется Chillwave Drive. Трение колес теперь моделируется на чистых силах вместо встроенных джоинтов Newton, что сделало симуляцию более точной и стабильной. При движении используется динамическое трение (продольное и поперечное) на основе формул Pacejka ’94, при остановке — статическое, препятствующее боковому скольжению машины на склоне. Улучшено управление с контроллера, также добавлена новая модель машины и шейдер неба с облаками и сменой дня и ночи.
Скачать готовую сборку демки под Windows можно тут.
В 2013-2017 годах я писал собственный физический движок, в котором LCP решается через систему неравенств для скоростей: каждое неравенство вводит в систему ограничение свободы для пары столкнувшихся тел, солвер итеративно решает столкновения путем корректировки скоростей. Это универсальный, но вычислительно недешевый метод, к тому же подверженный эффектам нестабильности. Импульсная физика хороша для движущихся тел, но не очень стабильна в состояниях покоя — тела часто дрожат, и для их «успокаивания» приходится вводить различные уловки и хаки, которые неизбежно вводят в систему ошибки, понижая точность симуляции.
В импульсных движках используется интегрирование Эйлера:
Где Δx — скорость частицы — интегрируется аналогичным образом на основе ускорения:
Таким образом, «физично» подействовать на частицу можно только через скорости и силы. Все ограничения в систему вводятся только через скорости — модифицировать позиции тел вручную нельзя, что делает импульсную физику в играх менее удобной для определенных геймплейных задач. Однако существует альтернативный подход на основе интегрирования Верле:
Из формулы получается, что для частицы не нужно хранить скорость, но нужна позиция с предыдущего шага интегрирования.
for (size_t i = 0; i < positions.length; i++)
{
Vector3f currentPos = positions[i];
positions[i] += (currentPos - oldPositions[i]) + freeFallAcceleration * (dt * dt);
oldPositions[i] = currentPos;
}
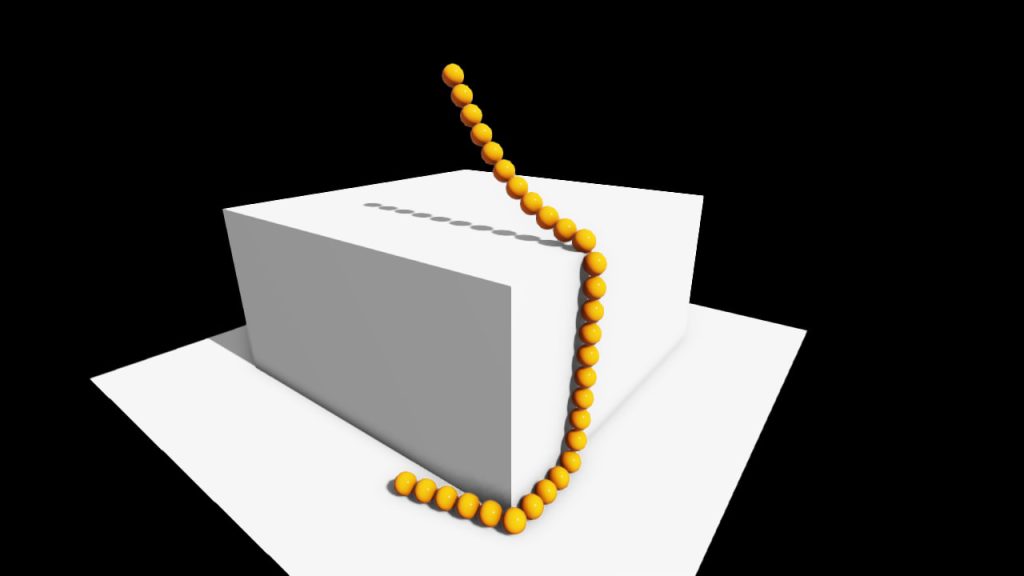
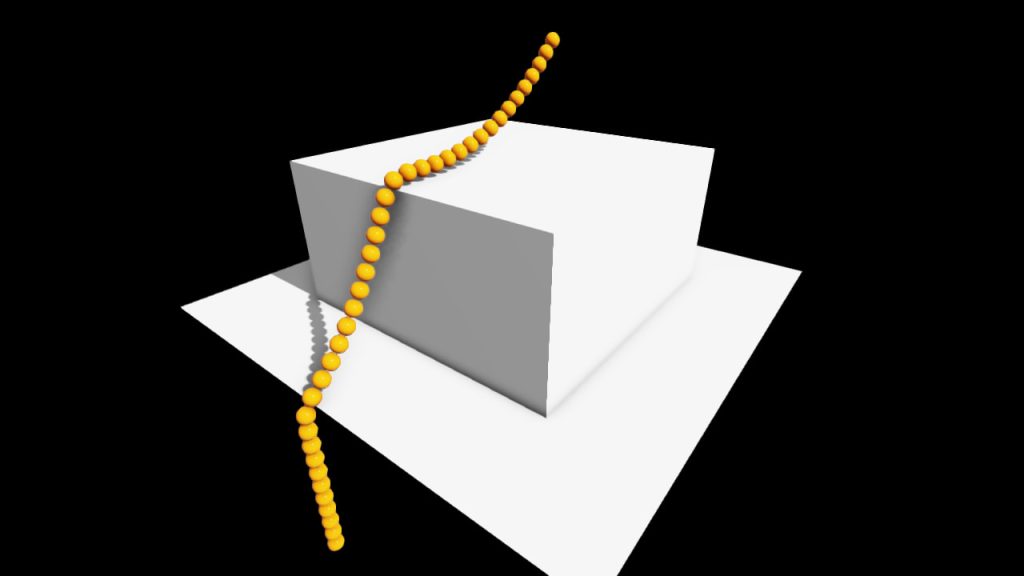
Метод Верле позволяет легко вводить в систему ограничения: чтобы их решить, нужно итеративно скорректировать позиции частиц. Например, в случае с веревкой — то есть, набором последовательно соединенных частиц — расстояние между ними делается таким, каким оно должно быть (то есть, позиции частиц корректируются так, чтобы расстояние между ними не увеличивалось и не уменьшалось):
Аналогичным образом разрешаются столкновения: для частиц вводится объемная оболочка (например, сфера), взаимопроникшие тела перемещаются в кратчайшем направлении так, чтобы их оболочки не пересекались. Алгоритмы проверки столкновений обычно дают необходимую для этого информацию — нормаль и глубину проникновения. Преимущество перед импульсным подходом в том, что для этого не нужно составлять систему для скоростей — вы можете напрямую корректировать позиции и, таким образом, легко реализовать любую модель столкновений.
Попытка написать для Dagon физику веревки на основе интегрирования Верле увенчалась успехом! Добавил даже поддержку столкновений с боксами. В скором времени выложу эту демку в публичный доступ. Не исключено и добавление веревки в качестве встроенного объекта в движок.
Записал видео обновленной демки с физикой автомобиля на движке Dagon: новая модель трения (формула Пацейки), поддержка звуков (используется движок SoLoud), множество мелких улучшений и багфиксов.