Демка с физикой автомобиля, которую я разработал в начале этого года для Patreon Sponsor Folder, теперь доступна на GitHub в репозитории https://github.com/gecko0307/vehicle-demo — с многочисленными улучшениями, которые я сделал за последние месяцы (в частности, появилась поддержка модели трения колес Pacejka Magic Formula). Пруф того, что на основе связки Dagon + Newton вполне можно написать гоночную игру. Как-нибудь, возможно, напишу подробную статью на эту тему.
Классный подарок на Новый год: на днях наконец-то вышел Newton 4. Скомпилировал, потестил — очень понравились производительность и точность в сценах с большим количеством тел, а также примеры с физикой автомобиля. К сожалению, пока нет C-интерфейса, поэтому невозможно написать биндинг для D, но, похоже, работа в этом направлении ведется (разработчики планируют использовать SWIG, либо собственный генератор API для произвольных языков).
Вышла новая версия движка Dagon. Главное нововведение в этом релизе — поддержка моделей в формате glTF (gltf+bin). glTF представляет собой текстовое описание трехмерной сцены на основе JSON, хранящее всю информацию, необходимую для ее отрисовки (граф, материалы, текстуры и т.д.). Главной особенностью glTF является лейаут, оптимизированный по скорости загрузки — для передачи в графические API данные из glTF практически не нужно декодировать или конвертировать, поэтому сцены загружаются очень быстро.
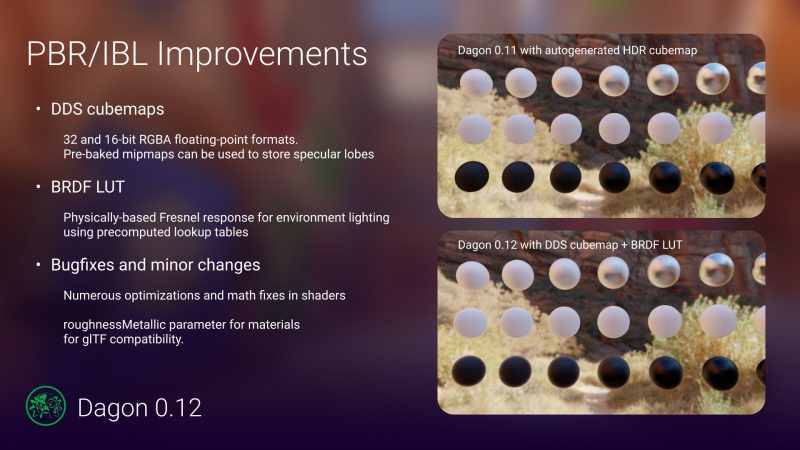
Также значительно улучшен загрузчик текстур в формате DDS. Список поддерживаемых пиксельных форматов расширился (в частности, 32- и 16-битными RGBA с плавающей запятой), появилась поддержка кубических карт и mip-уровней. К примеру, теперь стало возможно загружать кубические карты с предрассчитанными зеркальными лепестками (specular lobes) для разных уровней шероховатости. Декодирование неигровых форматов изображений (PNG, JPEG и др.) в Dagon теперь осуществляется при помощи библиотеки stb_image, что в разы ускорило загрузку ресурсов. Как бесплатный бонус — появилась поддержка формата PSD.
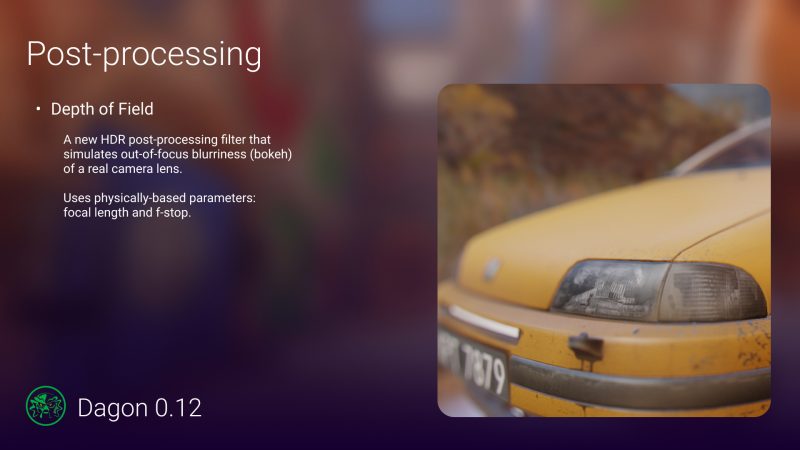
Добавлен новый эффект постобработки Depth of Field (расфокусированность) с реалистичным боке и настройками оптики. Исправлены некоторые баги постобработки и отложенных эффектов — в частности, устранен артефакт «черных точек».
На смену встроенному физическому движку dmech идет привязка к Newton Dynamics, реализованная как расширение dagon:newton (подключается к проекту как отдельная зависимость). Newton предоставляет отличный компромисс между производительностью и стабильностью симуляции, поддерживает все стандартные геометрические тела, а также поддержку физики для ландшафтов и произвольных объектов (автоматически генерирует выпуклые оболочки для мешей).
Экспериментирую с интеграцией Newton Dynamics — лучшего на сегодняшний день свободного физического движка с API для C. Специально для этого написал биндинг bindbc-newton.
Давно мечтал написать собственный автосимулятор, хотя бы простенький. Насколько я знаю, на D ничего подобного никто еще не делал, и вот вам proof-of-concept: с использованием dmech можно реализовать вполне сносную физику автомобиля с моделированием колес и подвески на основе лучей (raycast car).
Я, впрочем, не планирую создание полноценной гоночной игры, поэтому не стал моделировать реальные характеристики двигателя, тормозов и т.д. — автомобиль движется под действием двух сил на каждое колесо, продольной и боковой, основанных на взятых «с потолка» константах. В принципе, ничто не мешает сделать точные расчеты этих сил.
Демка использует модифицированную версию dmech, а также Dagon в качестве графического движка (опять-таки с модификациями, которые совсем скоро войдут в основной репозиторий — к примеру, реализованы тени и шейдерный бэкенд для материалов). Все зависимости включены в архив, кроме dlib 0.11.1. Прилагается сборка для Windows. Можете использовать демку в своих проектах (код доступен под лицензией Boost).
Доступна новая демонстрация работы dmech — на этот раз, на примере игровой кинематики (Character Controller) для игры от третьего лица. Персонаж умеет двигаться и прыгать, взаимодействуя со всеми физическими объектами и тримешем уровня.
Управление: Стрелки — поворот вправо-влево и движение вперед-назад; Пробел — прыжок.
В физическом движке dmech реализована поддержка пересечения тел с лучом (raycast). В качестве алгоритма для этого используется разновидность GJK. На данный момент есть возможность «стрелять» лучом в статические и динамические выпуклые тела, в ближайшем будущем появится также поддержка полигональных мешей.
В физическом движке dmech существенно улучшена реализация ограничений для тел (constraints):
Добавлено угловое ограничение (AngleConstraint), которое заставляет два тела принимать один и тот же поворот относительно друг друга;
Улучшено ограничение расстояния (DistanceConstraint), которое удерживает тела на определенном расстоянии друг от друга. Теперь можно ограничивать минимальное или максимальное расстояние между телами. Также этот вид ограничения может работать в качестве пружины с задаваемой жесткостью.
Комбинация углового и скользящего (Slider) соединений дает призматическое, которое позволяет двум телам скользить вдоль оси между ними, но не позволяет им вращаться относительно этой оси. Также возможны другие комбинации — в будущем в движке планируется реализовать класс составных ограничений.
В dmech возвращена поддержка статических полигональных мешей. Она существовала и ранее, но ее на долгое время пришлось убрать по причине несовместимости с нынешней архитектурой движка — сейчас, наконец-то, ее код удалось адаптировать. Проверка столкновений с полигонами основана на все том же алгоритме MPR, но с оптимизацией за счет разбиения пространства (а именно, используется одна из разновидностей BVH — иерархии ограничивающих объемов). Поддерживается проверка столкновений меша с любыми выпуклыми телами (включая боксы, цилиндры, конусы и т.д.) Единственное ограничение — в настоящее время полигональные меши могут быть только статичными телами.
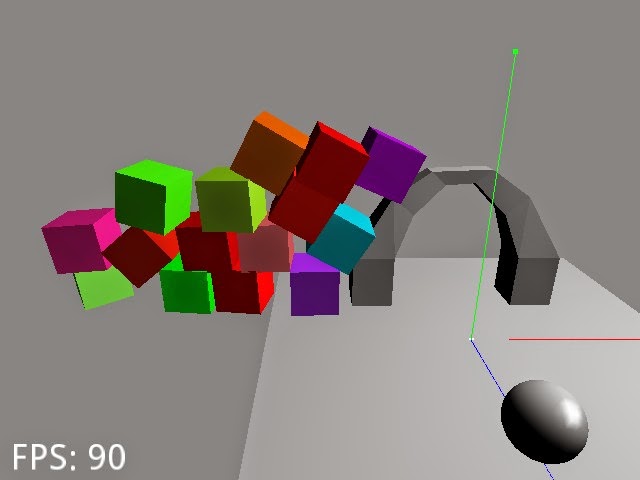
В физическом движке dmech реализована новая система кэширования контактов (persistent contact manifold), которая во многих случаях делает симуляцию более точной и правдоподобной. Также обновлен репозиторий dmech на GitHub. Кроме свежих изменений в кодовой базе самого движка, добавлены исходники демонстрационного приложения на основе OpenGL и SDL.