Как я уже не раз отмечал, игровая физика — это крайне недооцененный вид софта. Люди много говорят о графике, обыватель в играх вообще ничего, кроме графона, не замечает. А между тем, проверка столкновений и физика — вот что по-настоящему важно. Устаревший визуал и любительский уровень моделей игре можно простить, но проваливание персонажа сквозь пол и стены — нет. Я видел множество инди-проектов, потенциал которых был загублен именно плохой физикой (и, как следствие, неудобным управлением), а не графической или геймплейной составляющими. В мире инди и СПО вообще редко связываются с «физичными» жанрами типа экшнов, гонок, симуляторов и т.д. Свободные игры — это в основном стратегии, песочницы, 2D-аркады, рогалики. Физика довольно устойчиво ассоциируется с AAA и колоссальными бюджетами крупных издателей. Причина, конечно, в том, что она непредсказуема и плохо программируется. Она хороша в «чистом» виде — скажем, в симуляторе бильярда, где простая геометрия и нет вычислительно сложных ситуаций. Но если физика должна быть подчинена игровой логике, а не наоборот, то решения «по учебнику» резко перестают работать, приходится изобретать невиданные хаки и решать дичайшие корнер-кейсы. Это и отличает AAA от любительского геймдева — там коммерческие секреты, ноу-хау, огромный опыт. Я вот давно уже пишу контроллеры персонажа и не понаслышке знаю, как это непросто. А ведь хочется получить этот священный Грааль — чтобы персонаж свободно двигался по карте, не застревал, правильно сталкивался с препятствиями, поднимался по склонам и лестницам. Сегодня это необходимая база для 3D-игр любого жанра, кроме совсем уж простеньких.
Я пробовал писать собственный физдвижок (dmech). Это был очень полезный опыт, но, взвесив все «за» и «против», я все-таки решил использовать то, что сделано профессионалами — я ведь не физик, а графический разработчик. Пусть каждый занимается тем, что лучше всего получается. Я выбрал Newton Game Dynamics, который долгое время был, пожалуй, самым оптимизированным и точным среди всех, что имеют C-интерфейс. Это отличный физический движок, и я очень благодарен Хулио Хересу за этот проект, Newton много лет был прекрасным дополнением к Dagon. Я долго не хотел его менять, но технологии не стоят на месте. Newton 3 заметно устаревает, а Newton 4 — это уже чистый C++ без C-враппера, поэтому настало время переходить на что-то альтернативное. Есть серьезные основания полагать, что новым стандартом индустрии станет Jolt Physics от Guerrilla Games. Jolt используется в их движке Decima, лежащем в основе серий Horizon и Death Stranding — редкий случай, когда технология AAA-уровня сразу переходит в Open Source! Jolt — это реальный конкурент PhysX и Bullet, многие бесплатные и свободные игровые движки уже переходят на него один за другим: Godot, NeoAxis, Dagor. И, что самое замечательное, к Jolt есть полноценный C-враппер, позволяющий использовать его не только в C++.
Итак, что же там такого уникального? Во-первых, отличная оптимизация под SIMD и поддержка многопоточности (правда, это имеет значение лишь при каких-то редко встречающихся высоких CPU-нагрузках). Во-вторых, изначальная ориентация на игры — дизайн и набор фич показывают, что Jolt разработан игроделами для игроделов, для реального продакшна, а не академических публикаций. Движок ощущается, как некий «бесплатный Havok» из закромов энтерпрайза. У него много архитектурных особенностей, но в целом с ним очень приятно работать. Например, очень понравилось, что структуры векторов и кватернионов в Jolt бинарно совместимы с моими родными Vector3f и Quaternionf. Да и сама синхронизация через позиции и кватернионы вместо матриц 4×4 — это мудро, так как матрицы требуют декомпозиции.
Я, пока писал этот пост, уже успел написать для Dagon базовую обертку над Jolt (расширение dagon:jolt), концептуально весьма близкую с dagon:newton. Движки во многом похожи — используется классическая схема с разделением на тела и полиморфные шейпы. Многие функции имеют более удобный API, чем в Newton — например, рейкастинг. В данный момент обертка поддерживает создание статических и динамических тел, шейпов всех видов, включая меши, а также базовый контроллер персонажа, который я планирую довести, как минимум, до уровня NewtonCharacterController. К релизу Dagon 0.41 будут добавлены сочленения.
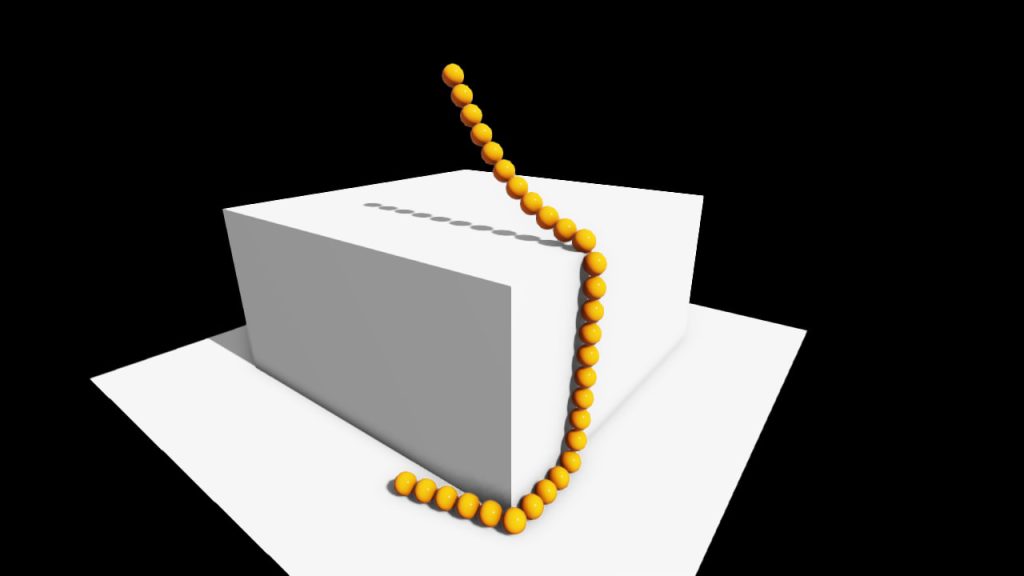
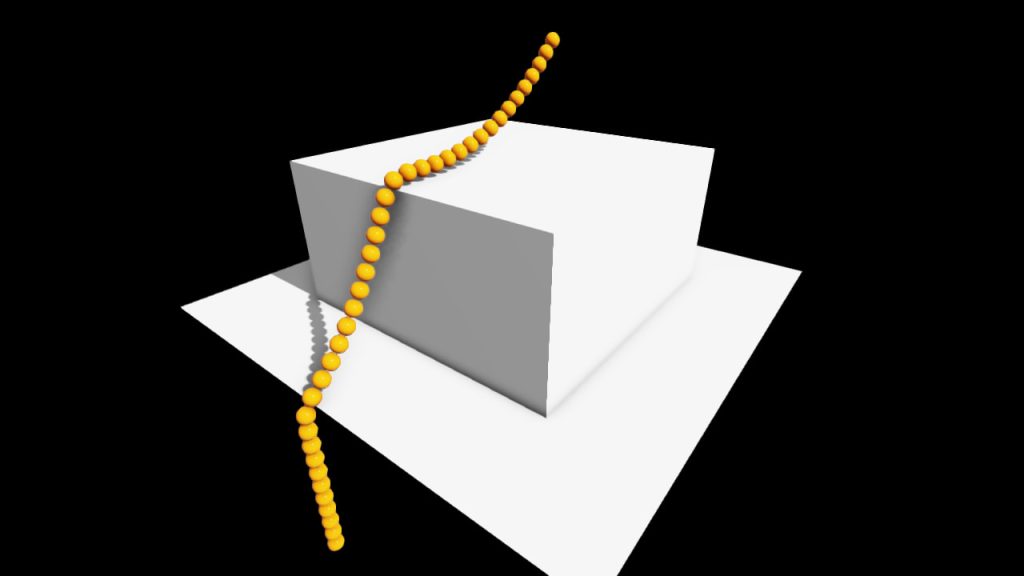
Контроллер персонажа CharacterVirtual особенно порадовал: я решил сразу попробовать его в деле. Шикарно, что управление контроллером (включая гравитацию и прыжок) осуществляется путем произвольного изменения вектора скорости — можно реализовать любую механику. Контроллер стабильный и точный, встроенный ground-тест работает надежно — основа для игры от первого лица пишется буквально за один вечер.

В Jolt есть поддержка мягких тел и даже встроенный симулятор автомобиля! Очень надеюсь, что когда-нибудь все это тоже получится перенести в dagon:jolt.
Использовать расширение не сложнее, чем dagon:newton, а в чем-то даже проще. Сначала нужно вызвать joltInit для инициализации:
class MyGame: Game
{
this(uint w, uint h, bool fullscreen, string title, string[] args)
{
super(w, h, fullscreen, title, args);
if (!joltInit())
exit();
currentScene = New!MyScene(this);
}
~this()
{
joltShutdown();
}
}Затем создать JoltPhysicsWorld:
import dagon.ext.jolt;
class MyScene: Scene
{
JoltPhysicsWorld physicsWorld;
this(MyGame game)
{
super(game);
this.game = game;
physicsWorld = New!JoltPhysicsWorld(eventManager, this);
}
}Пример создания статического тела для геометрии уровня:
Entity eLevel = addEntity();
eLevel.drawable = aLevel.mesh;
JoltMeshShape levelShape = New!JoltMeshShape(aLevel.mesh, physicsWorld);
JoltRigidBody levelBody = physicsWorld.addStaticBody(eLevel, levelShape);Динамическое тело:
Entity eCube = addEntity();
Vector3f cubeHalfExtents = Vector3f(0.5f, 0.5f, 0.5f);
eCube.drawable = New!ShapeBox(cubeHalfExtents, assetManager);
JoltBoxShape boxShape = New!JoltBoxShape(cubeHalfExtents, physicsWorld);
auto cubeBody = physicsWorld.addDynamicBody(eCube, boxShape, 10.0f);В onUpdate сцены, как обычно, шаг интегрирования:
override void onUpdate(Time t)
{
physicsWorld.update(t);
}