Доступна новая тестовая сборка Atrium: в физическом движке реализован новый таймер, который учитывает интерполяцию между кадрами с фиксированным шагом времени. Физика «не любит» нефиксированный шаг, поэтому время между двумя кадрами рендеринга разбивается на определенное количество шагов, а остаток просто линейно интерполируется.
physics
Atrium: интеграция физики
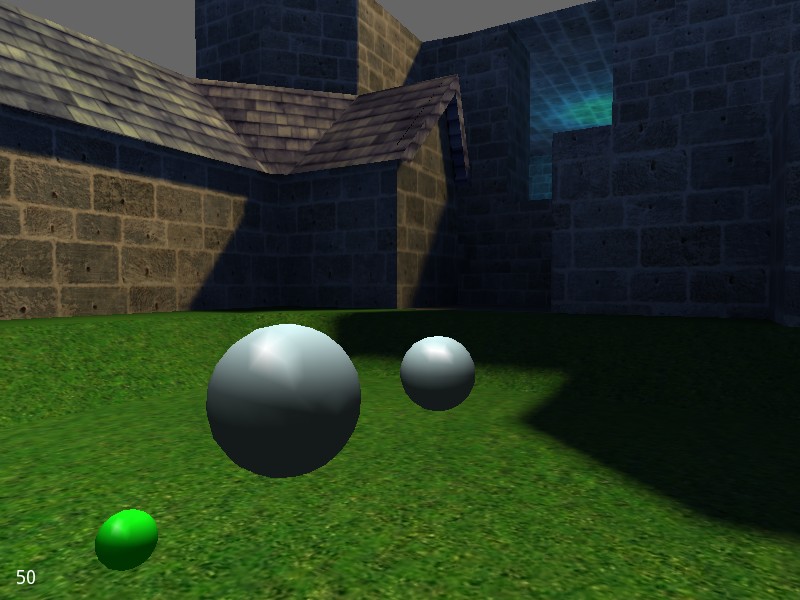 Доступна сборка Atrium со включенным физическим движком. Данная демонстрация показывает возможность создания игры от первого лица на основе физики: объект-игрок тоже представлен динамическим твердым телом (у которого просто отключена угловая скорость) массой в 80 кг. Перемещение игрока осуществляется путем приложения сил в нужных направлениях.
Доступна сборка Atrium со включенным физическим движком. Данная демонстрация показывает возможность создания игры от первого лица на основе физики: объект-игрок тоже представлен динамическим твердым телом (у которого просто отключена угловая скорость) массой в 80 кг. Перемещение игрока осуществляется путем приложения сил в нужных направлениях.atrium-physics-test2-win32.zip (3.13 Мб)
Поддержка боксов в физическом движке
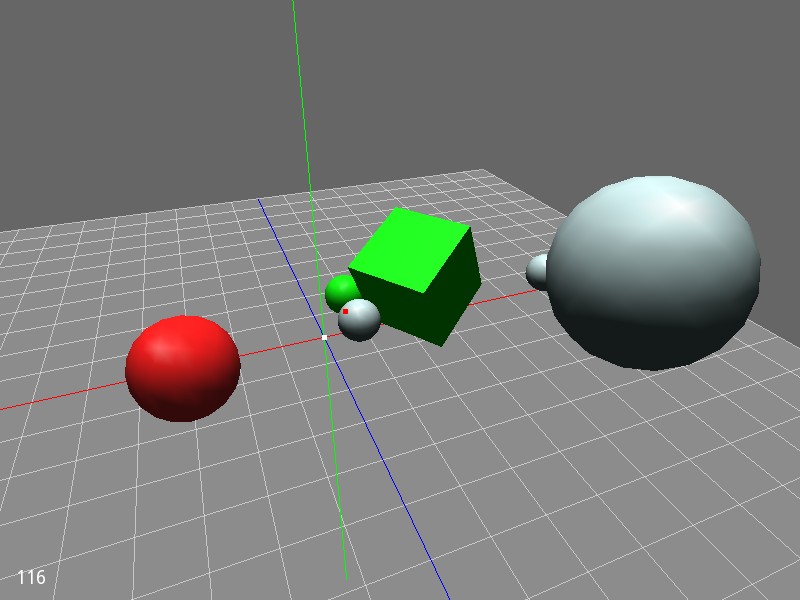 Доступна новая сборка физического движка: идет работа над реализацией поддержки ориентированных боксов (OBB). На данный момент работает обнаружение столкновений бокс-сфера и бокс-плоскость.
Доступна новая сборка физического движка: идет работа над реализацией поддержки ориентированных боксов (OBB). На данный момент работает обнаружение столкновений бокс-сфера и бокс-плоскость.
physics-test7-win32.zip (0.9 Мб)
Исходники физического движка
Выложил в открытый доступ исходники физического движка по лицензии Boost, как и весь мой остальной код. Проект пока находится на ранней стадии, но в настоящее время это чуть ли не единственная реализация импульсной физики в трех измерениях для D, так что, думаю, мои наработки могут многих заинтересовать.
physics-src-alpha0.zip (0.95 Мб).
Поддержка trimesh’ей в физическом движке
Доступная новая сборка физического движка: реализована поддержка статических полигональных мешей. Проверка столкновений с треугольниками оптимизируется при помощи BVH.
physics-test6-win32-optimized2.zip (0.98 Мб)
Обновление физического движка
Доступная новая бинарная сборка моего физического движка. Повышена точность солвера контактов: тела больше не проникают друг в друга под тяжестью своего веса. Добавлена поддержка интегрирования методом Верле.
Исходники ждите в ближайшем будущем — они вскоре будут интегрированы в Atrium.
Исходники ждите в ближайшем будущем — они вскоре будут интегрированы в Atrium.
physics-test5-win32.zip (0.8 МБ)
physics-test5-linux-x86.tar.bz2 (2.0 МБ)
Кроме того, недавно я завел аккаунт на DropBox — теперь все публичные файлы буду выкладывать туда.
Пример физики на движке Chipmunk
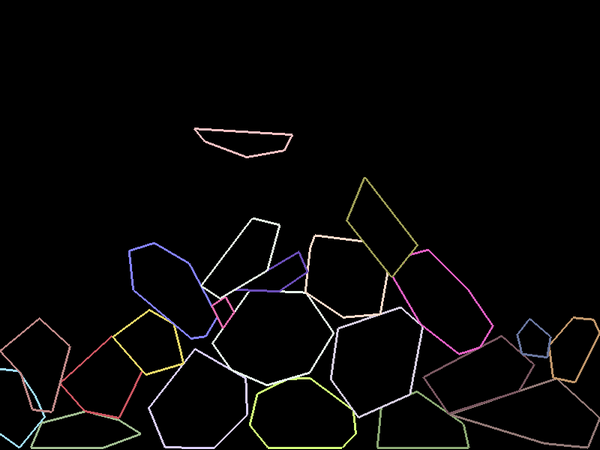 Пример рисования мышью многоугольников, которые сразу же начинают «жить» в физическом мире. В качестве физического движка используется ChipmunkD — прямой порт Chipmunk на D. Демка может быть использована в качестве основы для physics-based 2D-игры. Единственное ограничение — поддерживаются только выпуклые многоугольники, неконвексная геометрия просто отсеивается и не тесселируется до простых форм.
Пример рисования мышью многоугольников, которые сразу же начинают «жить» в физическом мире. В качестве физического движка используется ChipmunkD — прямой порт Chipmunk на D. Демка может быть использована в качестве основы для physics-based 2D-игры. Единственное ограничение — поддерживаются только выпуклые многоугольники, неконвексная геометрия просто отсеивается и не тесселируется до простых форм.
В архиве — исходники и сборки для Win32 и Linux x86:
polyshaper-all-platforms.zip (1.16 МБ)
Внимание! Пример писался достаточно давно — исходный код, скорее всего, не скомпилируется современными версиями DMD без дополнительных «танцев с бубном».
Сборка физики для Windows
Доступна сборка демки физического движка для Windows:
physics-testbuild1-win32.zip (0.9 МБ)
physics-testbuild1-win32.zip (0.9 МБ)
Физический движок
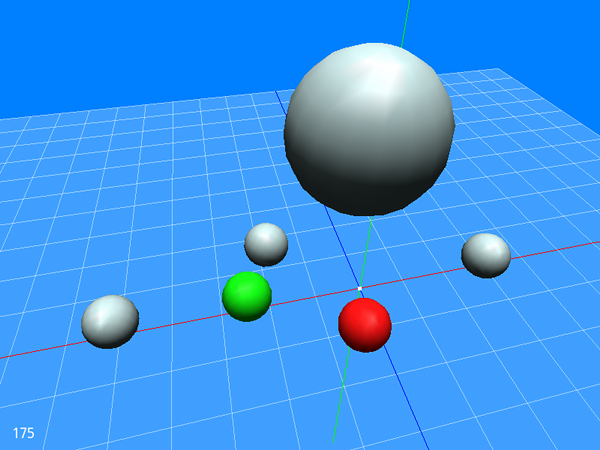
Не писал уже целый месяц, приношу за это извинения читателям этого блога =) Месяц ушел на создание каркаса физического движка для Atrium. Для решения контактов используется метод Sequential Impulses, поддерживается трение. На данный момент реализованы два типа геометрических объектов — сфера и бесконечная плоскость. Интегрирование пока производится методом Эйлера, планируется поддержка метода Рунге-Кутты.
В представленной демке симулируется система из 6 шаров и плоскости. Красным шаром можно управлять с клавиатуры (клавиши-стрелки). Зеленый шар имеет повышенную массу, большой шар — пониженную.
Сборка для Linux:
physics-testbuild1-linux-glibc28-x86.tar.bz2